Eur Urol Focus:机器人辅助根治性前列腺切除术后尿失禁的预测
时间:2021-04-29 13:01:36 热度:37.1℃ 作者:网络
已有研究表明,机器人手术期间记录的器械运动学指标可以预测尿失禁的结果。

最近,有研究人员评估了患者和治疗因素、外科医生效率指标和外科医生技术技能评分,特别是膀胱尿道吻合术(VUA),对预测机器人辅助前列腺根治术(RARP)后尿失禁恢复的模型的贡献。
研究人员收集了2016年7月至2017年12月进行的RARP的自动性能指标(APMs;仪器运动学和系统事件)和患者数据。研究结果发现,在115名接受RARP的患者中,89人(77.4%)的尿失禁康复,康复中位时间为166天(四分位数范围[IQR] 82-337)。23名外科医生进行了VUA手术。RACE评分的中位数是28/30(IQR 27-29)。在单个数据集中,技术能力(RACE)产生了最好的模型(C指数:CoxPH 0.695,DeepSurv:0.708)。在简略的APMs中,后部/前部VUA产生的模型性能优于其他RARP步骤(C指数0.543-0.592)。在详细的APMs中,针头驱动的指标产生了比其他缝合阶段表现更好的模型(C指数0.614-0.655)。另外,DeepSurv模型的表现一直优于CoxPH;两种方法在提供所有数据集时表现最好。局限性包括特征选择,这可能排除了相关信息,但预防了过度拟合。
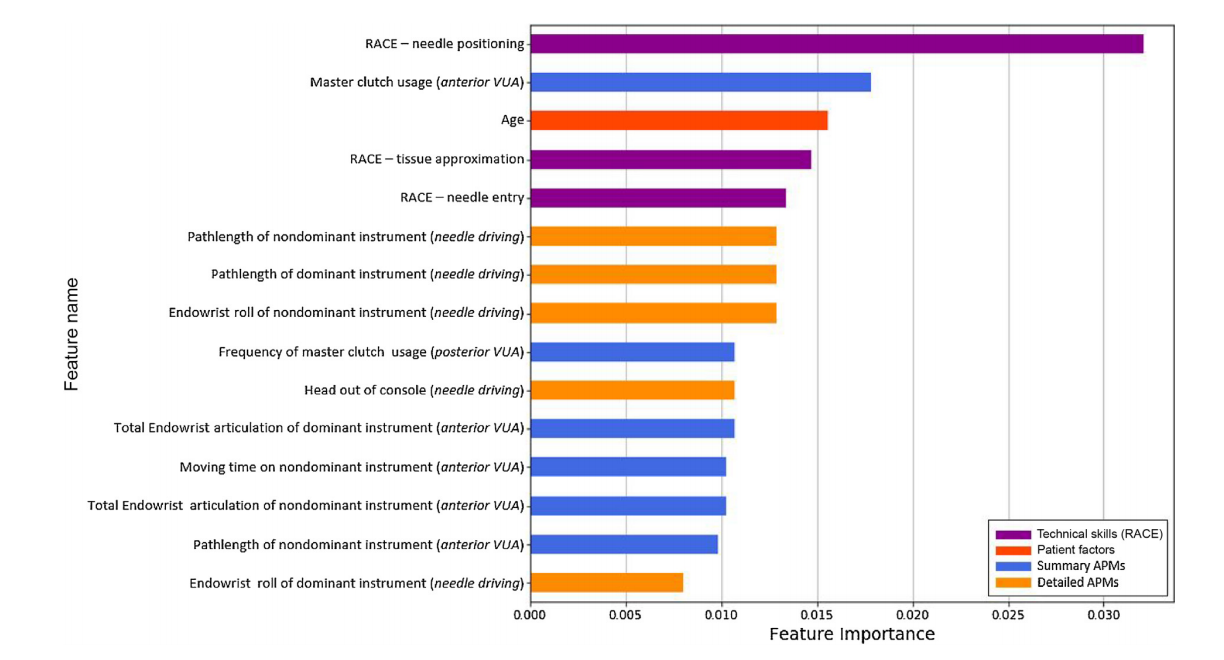
深度学习生存分析模型中特征重要性排序
最后,研究人员指出,VUA中的技术能力和 "针驱 "APMs是贡献最大的。表现最好的模型使用了所有数据集的协同数据。
原始出处:
Loc Trinh, Samuel Mingo , Erik B Vanstrum et al. Survival Analysis Using Surgeon Skill Metrics and Patient Factors to Predict Urinary Continence Recovery After Robot-assisted Radical Prostatectomy. Eur Urol Focus. Apr 2021

